Wheels
When choosing the wheels for your project you should consider the type of motors you intend to use. The motors speed and torque (turning force) will play an important role in the final operation of your robot. A small motor with a low torque may not be able to drive a large wheel, but a small motor with a gearbox to change the velocity and torque of the output may be able to drive what an un-geared motor cannot. Also consider the speed of the motor and the circumference of your wheel so that your robot moves at the speed you desire. Consider using a motor with an encoder if you want to measure how far or fast your robot is travelling.
The texture, the width of the wheel and the type of terrain your robot is expected to cover, are also important factors. A very smooth wheel will have less traction than rough wheels like foam wheels. Very thin wheels will turn easier than wide wheels. Omni-directional wheels are designed to roll forwards but slide sideways with almost no friction, to change direction.
Some wheels are constructed with a flange, to allow mounting directly to a motor shaft. Other motors use aluminium hubs, which are available to fit a range of motor shafts from 4mm to 10mm diameter. Aluminium brackets are available to provide a solid mounting for the motors.
-

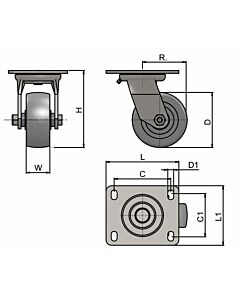 Top Plate Fitting Swivel Castors - Nylon Wheel - Ball Journal BearingAs low as £14.88 £12.40
Top Plate Fitting Swivel Castors - Nylon Wheel - Ball Journal BearingAs low as £14.88 £12.40 -
.jpg)
-1.jpg)
-

-

-

-

-
-mecanum-wheel.jpg)
-mecanum-wheel-1.jpg)
-


-
-2.jpg)
-1.jpg)
-


-




-2-pack.jpg)
-2-pack-1.jpg)
.jpg)
.jpg)
.png)




.jpg)
-1.jpg)
